FORMOSA Project
Development of innovative FunctiOnal aiRcraft MOveable SurfAces
The present project is addressed in the framework of CleanSky 2 Fast Rotorcraft (FRC) IADP. In this context, the Next-Generation Civil Tiltrotor (NGCTR) demonstrator will be dedicated to the design, construction and flying of an innovative Civil Tiltrotor technology demonstrator, the configuration of which will go beyond current architectures for this type of aircraft. Indeed, demonstration activities planned in this framework will be aimed to show significant improvement with respect to current tiltrotors’ state-of-the-art. In particular, this novel tiltrotor configuration will host a peculiar wing that includes several movable surfaces controlled by complex kinematics mechanisms that will be flight tested in the framework of Clean Sky 2. The wing design was conceived to assign a specific function for each movable surface. An inner large flaperon was conceived for download reduction (flap role) while an external flaperon was conceived for roll control as well as for download reduction. The design of the future NGCTR will encourage an innovative solution for the wing movable surfaces able to incorporate multiple functions (download alleviation, flap, aileron) thus reducing the complexity of the actuation system.
Partners
FORMOSA | Development of innovative FunctiOnal aiRcraft MOveable SurfAces
FORMOSA Project
Development of innovative FunctiOnal aiRcraft MOveable SurfAces
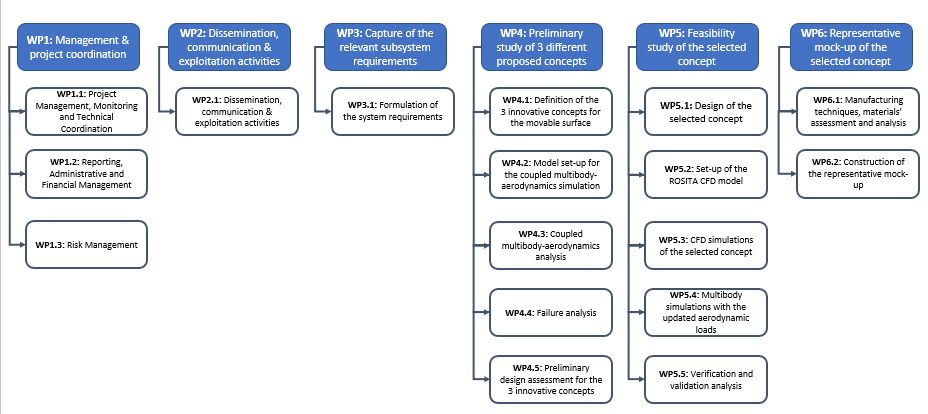
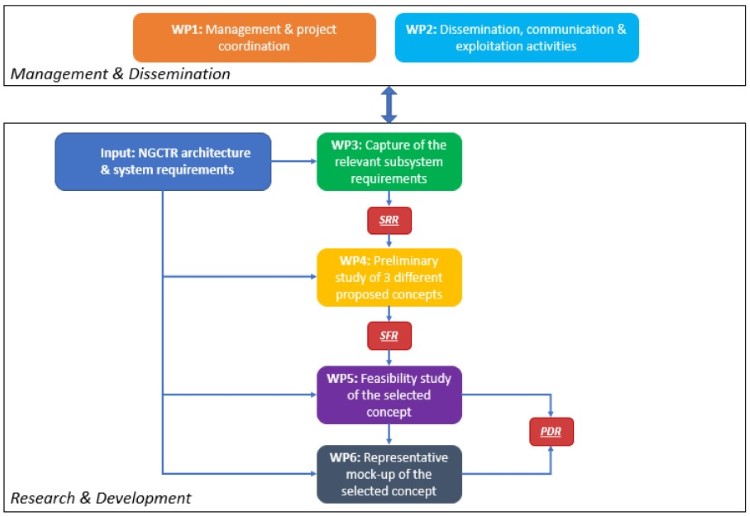
The project is organized in 6 WPS.
WP1 deals the management and project coordination. WP2 deals with communication, dissemination and exploitation, WP3 deals with the capture the relevant subsystem requirements to be satisfied for the movable surface. WP4 deals with the preliminary study of 3 different proposed concepts for the movable surfaces. WP5 deals with the feasibility study of the selected concept. WP6 deals with the design and manufacture of the mock-up of the selected concept.
The present project is addressed in the framework of CleanSky 2 Fast Rotorcraft (FRC) IADP. In this context, the Next-Generation Civil Tiltrotor (NGCTR) demonstrator will be dedicated to the design, construction and flying of an innovative Civil Tiltrotor technology demonstrator, the configuration of which will go beyond current architectures for this type of aircraft. Indeed, demonstration activities planned in this framework will be aimed to show significant improvement with respect to current tiltrotors’ state-of-the-art.
In particular, this novel tiltrotor configuration will host a peculiar wing that includes several movable surfaces controlled by complex kinematics mechanisms that will be flight tested in the framework of Clean Sky 2. The wing design was conceived to assign a specific function for each movable surface. An inner large flaperon was conceived for download reduction (flap role) while an external flaperon was conceived for roll control as well as for download reduction. The design of the future NGCTR will encourage an innovative solution for the wing movable surfaces able to incorporate multiple functions (download alleviation, flap, aileron) thus reducing the complexity of the actuation system.
The high-level objective of this project will be the investigation of innovative concepts for the NGCTR wing, including an innovative movable surface solution with multiple functions. Moreover, the study will include the actuation system design suitable to address all functions requested on flight envelope. Therefore a careful study of both the kinematics and aerodynamics of this innovative system will be performed to reach the PDR level of the proposed concept. The high-level objective will be obtained by means of the following series of sub-objectives:
● Objective#1: Capture of the relevant subsystem requirements
This will be achieved with a strict support of the IADP leader who will provide, at the beginning of the project, requirements that the movable subsystem has to guarantee taking into account all the relevant components of the tiltrotor wing. The main requirements are defined to guarantee sufficient download reduction during vertical take-off and landing and to provide the desired roll-authority for airplane roll control, according to the key flight conditions defined by the IADP leader. All these requirements must consider the geometry and size of the actual NGCTR wing, that will be taken into account as a strong constraint for the actuation system design.
● Objective#2: Preliminary study of 3 different proposed concepts
This will be achieved through a coupled multibody-aerodynamics analysis of 3 different solutions able to fit the requirements captured for the movable surface system. The outcome of the coupled analysis will be the selection of the more promising concept that will provide the best performances, reducing the level of complexity of the actuation system together with costs. Preliminary analyses will be performed by using ad-hoc in-house codes, based on panel methods for aerodynamic loads estimation and multibody simulation for the study of nonlinear kinematics and dynamics of the proposed actuation systems.
● Objective#3: Feasibility study of the selected concept
This will be achieved through a deep study of the selected concept obtained with a combination of a most accurate CFD simulation for the evaluation of the aerodynamic loads (e.g. during the deployment phase and at fixed positions) and a multibody analysis for the evaluation of the actuator and control chain loads of the real aircraft. The results of the analysis will be used for the selection of the actuators on the real aircraft and to design the control chain that will lead to the final CAD drawings. The output will show the integration of the selected kinematic mechanism and the movable surface within the tiltrotor wing at PDR level.
● Objective#4: Mock-up of the selected concept
This will be achieved by the design and manufacturing of a representative mock-up of the selected concept, including the movable surface system. The design of the mock-up will include the selection of the proper actuators and control chain linkages aimed to be fully representative of the studied concept and to show the correct functionality of the final proposed solution.



Type of action: CS2-RIA
Project number: 885971
Starting Date: 01.09.2020
Duration (months): 30


